Pipeline Overview
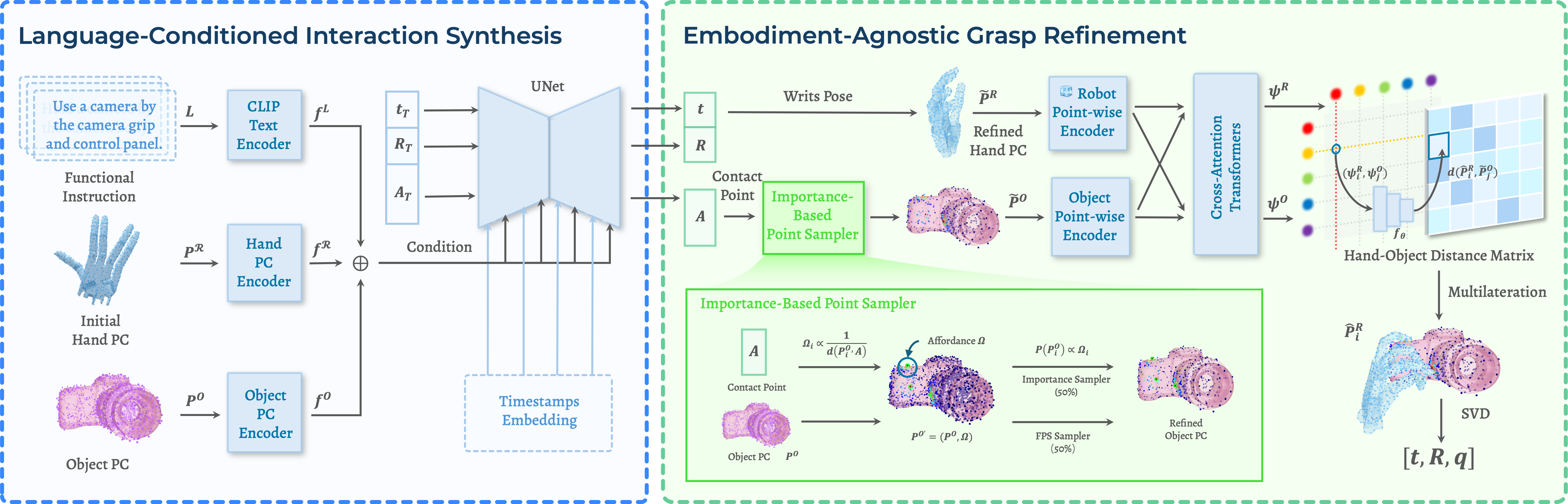
Overview of our Functional $\mathcal{D(R,O)}$ Grasp framework.
Left: Language-Conditioned Interaction Synthesis translates functional instructions into wrist poses and contact anchor points via a diffusion model.
Right: Platform-Agnostic Grasp Refinement converts these interaction elements into a unified hand-object distance representation to generate precise joint configurations across different robotic hands.